
这次我们不谈技巧,尝试来理解一下那些怎么都学不会的线代概念。
根据 2025 年的 NOI 大纲,线性代数作为 OI 中的考点分散在提高和 NOI 级中,其中有:
- 向量与矩阵
- 矩阵初等变换
- 矩阵运算及高斯消元
- 逆矩阵
- 行列式
- 向量空间、线性相关
- 基与线性基
前三者为提高考点,后四者为 NOI 级考点。线性代数相关内容常常作为优化性能或者突破口而出现,如优化递推和线性基在位运算相关题目的运用。我属于那种学了又忘忘了又学每次都好像学会回头就忘的类型,这次把这几个考点串起来写一篇长文,照着 OI Wiki 来写注解和笔记。
在开篇之前感谢 3B1B 系列视频让笔者醍醐灌顶,还有机械工业出版社的《线性代数及其应用》一书,两者都同时囊括了生动和深度,非常值得一看。
建议 3B1B 配合关闭弹幕食用,你会在弹幕上发现民科、哲学家、玄学家、一学就会天才大学霸,极大概率只会看到一堆感叹和争吵而没有什么真正有效的信息,事实上大部分的勘误都在视频中指出,并且 3B1B 的视频虽然直观而且短但是信息量极大,经常需要反复观看暂停思考,绝对不是一眼就懂之后啥都没有。当一项事物或概念简单地呈现在面前时,其背后往往有着更为深刻的思想。扯的有点远……看的时候确实看弹幕和评论不太舒适。向量
$\text{vector}$ 的定义根据学科的不同而有很大的差异,学习过高中物理的同学也都知道,在物理学中有“标量”和“矢量”之称,在 OI 中,由于偏向于 CS 的属性,我们统一将其命名为“向量”,记为 $\vec{v}, \boldsymbol{v}$。
向量作为线性代数中最为基础的部分,在线性代数中通过研究其加法和乘法来探索和思考,向量是一种既有大小又有方向的量,我们同时也可以将其视为一种特定的运动,类似于在数轴上平移,我们在坐标系内以原点为起点画一条有向的线段,例如对于向量 $\begin{bmatrix} 3 \\ 2 \end{bmatrix}$,在几何意义上
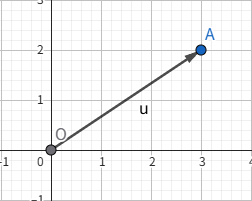
就是这样一条从原点开始,沿着 $x$ 轴正方向移动 $3$ 个单位,并沿着 $y$ 轴正方向移动 $2$ 个单位的有向线段。这里有几个概念:
- 向量的模:有向线段 $\vec{u}$ 的长度称为向量的模,即该向量的大小,记作 $|\vec{u}|$
- 单位向量:模为 $1$ 的向量称为该方向上的单位向量,记作 $\vec{e}$
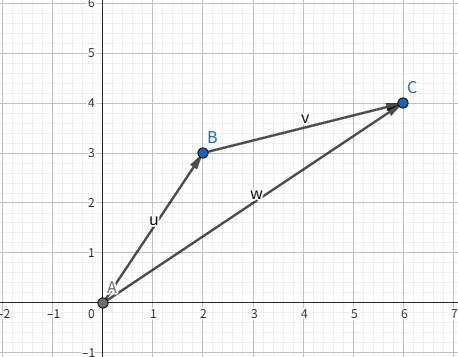
在编写代码中,向量 $\text{vector}$ 实际上就是一种 $\text{array}$:有序的数字列表。类比数的运算,向量加法就是把对应的项相加,或者我们换一种角度,从物理学中的位移概念来看,对于一个人经过的位移 $\overrightarrow{AB} + \overrightarrow{BC}$,我们可以将其看为 $\overrightarrow{AC}$。
线性组合和向量空间
Easy version
有一个重要的观点是:向量的加法和乘法可以看成向量的缩放和相加。据此,我们重新审视点坐标的表示:
暂不考虑向量空间和基的严谨表述,我们定义如下图的 $\hat{i}, \hat{j}$ 为坐标系的基向量。
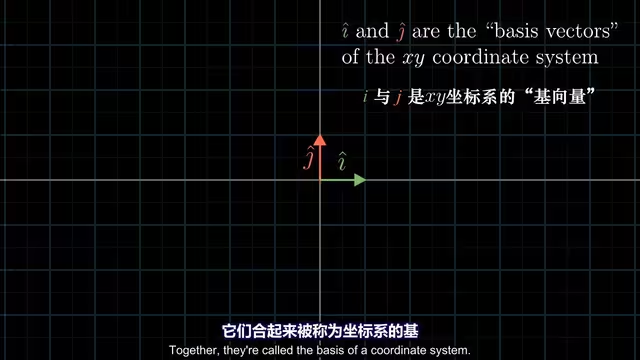
当我们将坐标视为标量,实际上任意的标量都是基向量缩放相加相加处理得来的,当我们用数字描述向量时,事实上就依赖于我们的基。不难发现选取不同的基对于“同一位置”的向量有着不同的表示。
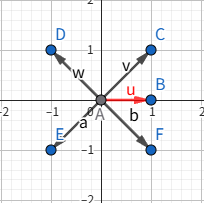
$$ a \vec{u} + b \vec{v} = \vec{w}, a, b \in \mathbb{R} $$
这种操作称之为“线性组合”,而这个由所有 $\vec{w}$ 构成的全集,即对于所有可以表示为给定向量线性组合的集合,称之为线性空间、向量空间,更准确地说是向量子空间,如果你看过 3B1B 的视频,译者巧妙地将这个 span 翻译成了“给定向量张成的空间”,非常形象生动。
对于二维向量的向量空间显然有 3 种情况:点、共线、平面。
为了便于研究,在研究单个向量时我们将其视作一条箭头,在有多个向量时,我们则简单地将其视为点,因为正如我们上面所说,在研究时我们将其起点视为原点 $(0, 0)$。
在三维空间的角度下,两个向量的缩放怎样呢?显然我们沿着缩放后的终点绘图可以得到一个过原点的平面,此时我们再施加第三个向量并对其进行缩放,形象地思考,这等同于将前两个向量张开的平面沿着新向量的方向来回移动,从而得到整个空间。
对于若干个向量,如果我们可以通过移除其中的一个向量而不减少向量张成的空间,我们称它们为“线性相关”的向量。这等价于一个向量可以表述为其他向量的线性组合,因为这个向量落在其他向量张开的空间里,无法形成新的约束。
若这若干个向量都给向量空间增加了新的维度,则它们是“线性无关”的。
更进一步的 Hard version
来看看严谨的定义如何吧。
一个向量空间是由一些被称为向量的对象构成的非空集合 $V$,在这个集合上定义了两个运算,称之为加法和标量乘法(标量属于全体实数),对于 $V$ 中所有向量 $u, v, w$ 及所有的标量 $c, d$ 都要服从以下公理:
- $\vec{u} + \vec{v} \in V$
- $\vec{u} + \vec{v} = \vec{v} + \vec{u}$
- $(\vec{u} + \vec{v}) + \vec{w} = \vec{u} + (\vec{v} + \vec{w})$
- $V$ 中存在一个零向量 $0$ 使得 $\vec{u} + 0 = \vec{u}$
- 对 $V$ 中每个向量 $\vec{u}$,存在一个向量 $-\vec{u}$ 使得 $\vec{u} + (-\vec{u}) = 0$
- $c \vec{u} \in {V}$
- $c(\vec{u} + \vec{v}) = c\vec{u} + c\vec{v}$
- $(c + d)\vec{u} = c\vec{u} + d\vec{v}$
- $c(d\vec{u}) = c(d\vec{u})$
- $1\vec{u} = \vec{u}$
称向量空间 $V$ 的一个极大线性无关向量集为 $V$ 的一组线性基,简称基。在 OI 中一般而言只会考虑 $n$ 维实线性空间 $\mathbf{R}^n$ 和 $n$ 维布尔域线性空间 $\mathbf{Z}_{2}^{n}$。
如果你对于线性空间与群的关系感兴趣,或者说愿意阅读更多严谨的表述,可以参见 线性空间 - OI Wiki,虽然我觉得不是非常好懂。
矩阵与线性变换
在线性代数中,向量有列向量和行向量之分,主要研究列向量。对于一个矩阵 $A$,主对角线指的是 $A_{i, i}$ 上的元素,定义单位矩阵 $I$ 表示主对角线上为 $1$,其余均为 $0$。
$\text{linear transformation}$ 中的 transformation 一词其实就是 $\text{function}$ 的意味,而 transformation 寓意着这一关系可以通过某种特定的方式来可视化,定义线性变换为:
- 所有直线在变换后仍然保持直线,不能有所弯曲,更进一步,所有“网格线”在线性变化之后仍应该保持平行且等距分布
- 原点保持固定
实际上,由于线性代数研究中对于线性变化的约束,对于任意一个向量在线性变化后的坐标,只需要通过记录基向量 $\hat{i}, \hat{j}$ 变化后的位置。还记得这个式子吗?
$$ \begin{aligned}& a \vec{u} + b \vec{v} = \vec{w}, a, b \in \mathbb{R} \ & \vec{v} = a \hat{i} + b \hat{j} \end{aligned} $$
在变换之后仍然有:
$$ \vec{v}’ = a \hat{i}’ + b \hat{j}' $$
获取基向量 $\hat{i}, \hat{j}$ 的信息只需要四个数字:变换后的 $x_{\hat{i}}, y_{\hat{i}}, x_{\hat{j}}, y_{\hat{j}}$。
把这四个元素丢在一个矩阵里,有一个专有名称称之为 $2 \times 2$ 矩阵($\text{Two-by-Two Matrix}$):
$$ \begin{bmatrix} x_{\hat{i}} & x_{\hat{j}} \\ y_{\hat{i}} & y_{\hat{j}} \end{bmatrix} $$
这也就是为什么在线性代数中研究对象通常为列向量。矩阵作为一个载体,记录着一个线性变化的信息,还记得我们对于坐标的标量表示吗?现在我们可以推出矩阵乘向量的表达了:
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \times \begin{bmatrix} x \\ y \end{bmatrix} = x \begin{bmatrix} a \\ c \end{bmatrix} + y \begin{bmatrix} b \\ d \end{bmatrix} = \begin{bmatrix} ax + by \\ cx + dy \end{bmatrix} $$
有一种特殊的矩阵形如:
$$ \begin{bmatrix} 1 & a \\ 0 & b \end{bmatrix} $$
这种变换中,$\hat{i}$ 不发生变化,它有一个特殊的名字为“剪切”($\text{shear}$):
如果变换后的 $\hat{i}, \hat{j}$ 是线性相关的,意味着其中一个向量是另一个向量的某种缩放(倍数关系),这个线性变换将整个二维平面积压在该向量组所在的直线上。
正如我们上文所说,从动态的视角来看,矩阵是对某空间的一种特定变换。
矩阵有一种特殊的操作称之为“转置”:在其右上角写上转置 $^{\boldsymbol{T}}$,表示交换矩阵的行与列。
矩阵乘法
由上文,线性变换完全取决于对空间内基向量的作用情况,当我们将矩阵和向量相乘时,就是将矩阵所描述的变换作用在向量上。现在我们来看看如何实现一个包含了“旋转”和“剪切”的复合变换:
$$ \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}, \begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix} $$
这两个矩阵分别对平面内向量进行 shear 和 rotate 操作,两个矩阵相乘有几何意义:两个线性变化相继作用:
$$ \overleftarrow{\begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}, \begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix}} $$
值得注意的是,矩阵乘法从右往左读,为什么?如果我们将矩阵变化看作一个函数,则对于向量 $\vec{v}$ 的作用有:
$$ f(g(\vec{v})) $$
对于函数的复合,显然是从内往外读,这样理解就自然的多。
对于两个矩阵中的不同列,我们分别视为元素和变化,抽离出来有:
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \times \begin{bmatrix} e \\ g \end{bmatrix} + \begin{bmatrix} a & b \\ c & d \end{bmatrix} \times \begin{bmatrix} f \\ h \end{bmatrix} = \begin{bmatrix} a \times e + b \times g & a \times f + b \times h \\ c \times e + d \times g & c \times f + d \times h \end{bmatrix} $$
注意到,矩阵乘法不具有交换律,从几何意义来看显然,举个例子,先旋转再剪切显然不一定等于先剪切再旋转。但是矩阵乘法具有分配律,也就是说:
$$ \boldsymbol{(AB)C} = \boldsymbol{A(BC)} $$
当然可以继续从几何的层面来思考这个问题,但是我们换个角度,如果拆开来看,将 $\boldsymbol{AB}$ 视为一个整体,那么无论如何加上括号操作,操作顺序永远是:$\boldsymbol{C} \to \boldsymbol{B} \to \boldsymbol{A}$。这样我们就轻松证明出了矩阵乘法重要的性质之一。
$3 \times 3$ 的矩阵乘法同理,这里不再赘述:
$$ \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & i \end{bmatrix} \begin{bmatrix} x \\ y \\ z \end{bmatrix} = x \begin{bmatrix} a \\ d \\ g \end{bmatrix} + y \begin{bmatrix} b \\ e \\ h \end{bmatrix} + z \begin{bmatrix} c \\ f \\ i \end{bmatrix} $$
行列式
在线性变换中,将坐标新中基向量张开的小正方形面积改变的比例称之为其行列式,记为 $\det(\boldsymbol{A})$。
如果一个二维线性变换的 $\det = 0$,则说明其将整个空间压缩在了一条线,或者说一个点上。一言概之,如果我们想要知道这个矩阵代表的变换下是否压缩了空间的维度,只需要检验其 $\det$ 是否为 $0$ 即可。
但是行列式是可以为负的?如何解释负的 $\det$ 呢?面积的比例显然不可能为负。
注意到,将行列式套上绝对值,其仍然表示面积缩放的比例,负号类比物理运动学,代表方向:标志着空间中的定向发生了变化,换而言之,基向量之间的相对位置发生了改变。三维下:
具体的有右手定则来判断三维空间中定向的改变。
逆矩阵,列空间,零空间
逆矩阵 $\boldsymbol{A}^{-1}$ 称为矩阵 $\boldsymbol{A}$ 的逆矩阵当且仅当 $\boldsymbol{AA}^{-1} = \boldsymbol{I}$,或者说,
矩阵的引入来自于线性方程组。将线性方程组的系数抽出来,写成矩阵乘法的形式更为方便,而逆矩阵的存在使得我们能够求解方程组,具体的:
$$ \boldsymbol{AA}^{-1} \vec{x} = \boldsymbol{A}^{-1} \vec{v} $$
当 $\det(\boldsymbol{A}) \neq 0$ 时 $\boldsymbol{A}^{-1}$ 存在,可以使用高斯消元求解。
注意到即使不存在逆矩阵,方程仍然可能存在解。就是这种清况:
这里我们引出秩的概念:当变换的结果为一条直线时(一维),我们称这个变换的秩为 $1$。如果变换后的向量落在某个二维平面上,我们称这个变换的秩为 $2$。秩代表着变换后空间的维度。
列空间是矩阵的列所张开的空间,秩其实是列空间的维数。
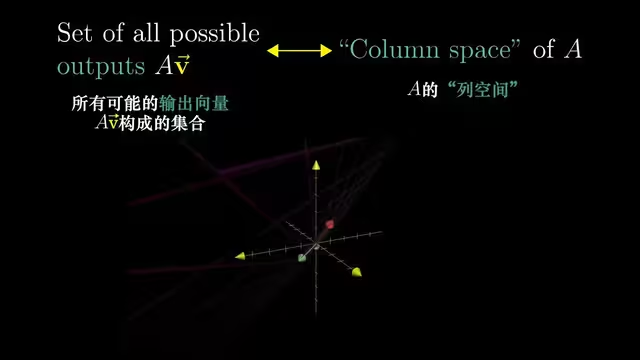
有一种特殊的秩:满秩。在这种情况下,秩与列数相等。
由于线性变换的要求之一是保持原点位置不变,所以零向量一定会包含在列空间中。对于满秩变换:只有零向量会在变换后落在原位置;但如果矩阵非满秩,则会压缩最终空间的维度,这意味着会有一部分向量被变换成了零向量。
变换后落在原点的向量集合被称之为“零空间”或者核(Kernel)。
- 当逆矩阵存在时,我们可以用其求解方程组
- 列空间让我们得知何时存在解
- 零空间有助于体现所有可能的解的集合